Education
|
Control Engineering I. (BSc) |
Control Engineering II. (BSc) |
|
Robot Control (BSC) |
|
Short description
The aim of the course is the introduction of the basic notions form the field
of control systems engineering and control theory. Both the design and
implementation of the wide spread control algorithms, which are used in
industrial control systems, are presented in detail. The applicability of the
presented control algorithms are demonstrated through simple practical examples
such as temperature control, position and velocity control.
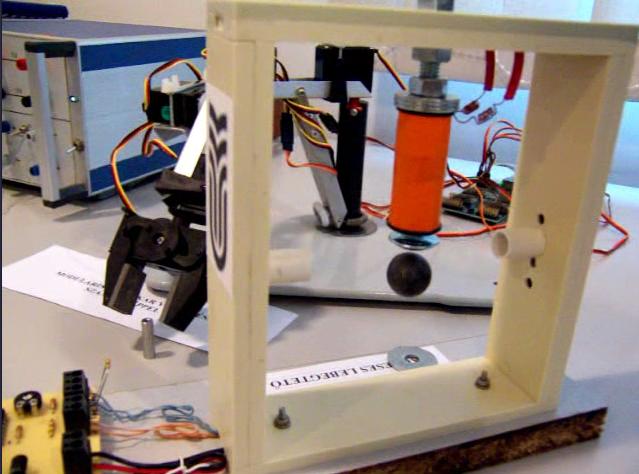
VIDEO: Control of a magnetic levitation system assisted by a robotic arm
Iranyitastechnika-Vizsgakerdesek_2020.pdf (Automatizálás, Mechatronika)
Iranyitasi_Rendszerek_Robotok-Vizsgakerdesek_2020.pdf (Számítástechnika, Távközlés)
Contents
Control of industrial systems
(open and closed loop, Automat-Manual), the control loop. (Iranyitastechnikai_Alapok.pdf) Labs Short description
IranyitastechnikaII_Vizsgakerdesek_2019_2020.pdf Labs Project Short description
VIDEO: robot programming
Robotiranyitasok_Vizsgakerdesek_2019_2020.pdf Contents
Robotok_Iranyitasa_Bevezeto.pdf
Robotok_Geometriaja_Kinematikaja.pdf
Robotokarok_Dinamikus_Modellezes_Palyatervezes_PDG_PID.pdf
Robotkarok_Palyakovetes_EroIranyitas.pdf Mobilis_Robotok_Iranyitasa.pdf Labs The visit of László Sólyom, president of The aim of the lab is the
practical support of the control courses described above. The laboratory
practices focus on the following aspects of the control engineering: Laboratory equipments for
real-time control applications:
Thesis projects for 4'th year students 2008/2009
(DiplomatervKiiras2009.pdf) 1. Decision making
algorithms with robot hockey applications 2007/2008
(DiplomatervKiiras2008.pdf) 1. Microcontroller
based networked robot control 2006/2007
(DiplomatervKiiras2007.pdf) 1.
Development of a networked robot control system 2005/2006
(DiplomatervKiiras2006.pdf) 2004/2005
(DiplomatervKiiras2005.pdf)
1. Study and implementation of a networked control system for trajectory
tracking Autonomous and
teleoperated systems Basic nonlinear control techniques Lyapunov stability theory Lp function spaces, Barbalat lemma Passivity and dissipativity of control systems Feedback linearization based control Teleoperation systems Haptic devices, teleoperation system architectures Passivity based control of teleoperation systems Autonomous systems Path planning, rapidly exploring random trees (RRT) Bezier-curve based path smoothing Kinematics and dynamic models of autonomous robots and cars Trajectory tracking control of mobile robots Feedback linearization based control of cars Formation control of mobile robots Passivity based formation control of cars GPS/INS sensor fusion, a Kalman Filter approach
VIDEO: trajectory
tracking with mobile robots
PID type control algorithms (continuous, discrete). Implementation issues,
Anti-Windup extension. (PID_Szabalyozo.pdf)
The influence of the control on steady state. Steady state error. Disturbance
rejection. (Allandosult_Allapot.pdf)
Basic problems of the controller design, requirements. Pole-Zero cancellation.
Design based on reference model. (Szabalyozotervezesi_Alapok.pdf)
Control of the processes with dead time. The Zeigler-Nichols and Oppelt
methods. Self tuning PID. (Holtidos_Folyamatok_Iranyitasa.pdf)
Cascade control systems. Cascade control of a DC motor. (Gyors_Folyamatok_Szabalyozasa_Kaszkad.pdf)
Feed forward control (Iranyitas_Elorecsatolassal.pdf)
Congestion Control in Computer Networks (Torlodas_kivedese.pdf)
Mobile Robot Control (Mobilis_Robotok_Iranyitasa.pdf)
Modeling and simulation of a DC servo motor
(IRI_L1.pdf)
Process monitoring in Visual C environment
(IRI_L2.pdf)
Real time temperature measurement and ON-OFF control (IRI_L3.pdf)
Real time proportional temperature control
(IRI_L4.pdf)
Real time PI control for temperature profile tracking (IRI_L5.pdf)
Modeling and PID control of industrial furnaces
(IRI_L6.pdf)
Self tuning controllers
(IRI_L7.pdf)
PID design for a chemical solution concentration
(IRI_L8.pdf)
Cascade control of a DC servo motor
(IRI_L9.pdf)
Implementation of an industrial PID controller
(IRI_L10.pdf)
Real time active damping. Data acquisition and testing (IRI_L11.pdf)
Real time active damping. PID control
(IRI_L12.pdf)
Advanced control design
methods are presented in this course. The discrete time implementation of the
proposed control algorithms are also presented. For the control of nonlinear
processes both model based (Lyapunov design, direct compensation of non-smooth
nonlinearities) and advanced (sliding, adaptive and neural ) control techniques
for plants with partially known or unknown parameters are presented.
Simth predictor (SmithPrediktor.pdf)
Dead beat controller (DeadBeat.pdf)
Robust PID controller design in frequency domain (PID_TervezesFrekvenciatartomanyban.pdf)
Phase lead compensator, phase lag compensator. (FazisSiettetes_FazisKesleltetes.pdf)
Lyapunov functions, Lyapunov stability. Sliding mode control. Adaptive
control and neural network based control. Deadzone and backlash compensation (NemlinearisIranyitasok.pdf)
Discontinuous control laws, Popov stability. (Tobballasu szabalyozok_Popov.pdf)
Real time active damping. System modeling and model validation (IRII_L1.pdf)
Real time active damping. Optimal state space control (IRII_L2.pdf)
Design and implementation of the Smith predictor
(IRII_L3.pdf)
Dead beat controller for positioning
(IRII_L4.pdf)
Design of a PID controller in frequency domain for velocity control (IRII_L5.pdf)
Nonlinear control of a ball and beam system
(IRII_L6.pdf)
Controller design for a flexible robotic link (IRII_FELEVES_TERV.pdf)
The first part of the course general notions from robotics (geometric,
kinematical and dynamic modeling of robotic arms) are presented. Henceforward
the trajectory planning problem for robots is introduced. Both the classical
PID type robot control (for point to point motion) and advanced model based control
of robotic manipulators (for trajectory tracking) are presented in the second
part of the course.
The robot: a short history, definitions, applications, components,
characteristics. Joint space, task space. Sensors and actuators used in robotic
systems.
Robot geometry. Coordinate transformations. Euler and RPY angles. Forward
geometric problem. Inverse geometric problem. The Denavit-Hartenberg
parameters.
Differential motion of the robot. The Jacobian of a robotic arm. Direct
kinematics and inverse kinematics, velocity transformation between joint and
task space.
Dynamic modeling. Euler-Lagrange equation. Dynamic model of a robotic arm and
its proprieties.
Trajectory generation.
Point to point motion control of a robotic arm. PD+G and PID control.
The computed torque method (for trajectory tracking)
Hybrid force and position control.
Real time issues in robot control: Hardware and software architectures, robot
programming languages.
Modeling and control of autonomous wheeled mobile robots
Direct geometric problem of the Stanford manipulator. (RI_L6.pdf)
Inverse geometric problem of a SCARA arm.
(RI_L7.pdf)
Trajectory generation and the task space of a SCARA arm. (RI_L8.pdf)
Introduction to SimMechanics. Modeling of a 2DOF manipulator. (RI_L9.pdf)
PID control of a cylindrical manipulator.
(RI_L10.pdf)
Robot Programming Language of the MTAB SCARA arm.
(RI_L11.pdf)
Point to point control of a mobile control. (RI_L12.pdf)

- Modeling of industrial processes and robotic systems.
Design of classical (PID, cascade control) and advanced (self tuning, sliding
mode, adaptive, optimal state feedback) control algorithms. The modeling and
the controller design are performed in Matlab/Simulink environment and in C++
(using the NewMat library) respectively.
- Real time implementation of control algorithms. After the
controller design the developed algorithms are implemented in C language and
are tested on real processes. The processes are interfaced to the computer
through Data Acquisition Cards. Among controller implementation, other aspects
of industrial informatics such as signal measurement, calibration and
filtering, process monitoring, data log are treated.


Temperature control system

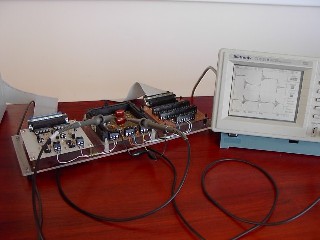
Real time control of oscillatory
processes


Computer based velocity and
position control and tracking with DC servo motor


SCARA robot control system
Temperature control in a furnace
2. Modern image processing methods for mobile robot recognition
and tracking
3. Soft computing methods for robot arm control
2. Computer control of robotic systems
3. Control and motion analysis of a cooperative mobile robot team
2. Real time robot control based on image processing
3. Computer control of a parallel robotic arm
1. Design of a robot control system for a SCARA
robot arm
2. Control of a 2 DOF positioning system through
the Internet
3. Control of a magnetic levitation system using
microcontroller
2. Implementation of a self tuning
regulator for slow industrial processes
3. Design of a 2DOF positioning
system with DC servo motors
Contents:
![]()