
A bukaresti székhelyű Agenţia Naţională pentru Programe Comunitare în Domeniul Educaţiei şi Formării Profesionale (ANPCDEFP), amely Romániában az Európai Gazdasági Térség Alap (EGT Alap - Norvégia, Liechtenstein és Izland által létrehozott támogatási alap) kezelését vállalta fel, pályázatot hírdetett 2018 decemberében, Mobility Projects in Higher Education címmel.
A pályázat célja a hallgatók nemzetközi mobilitásának támogatása, ami
lehetővé teszi az oktatási, nyelvi, szakmai és kulturális tapasztalatok
megszerzését külföldi felsőoktatási intézményekben, az Európai
Gazdasági Térségen belül.
A Sapientia EMTE Marosvásárhelyi Kara sikeresen pályázott, és
megnyerte a 18-MOB-0034 számú szerződéssel iktatott, 12 962 EUR értékű
mobilitási projektet. Ennek keretén belül kerül meghirdetésre az alábbi
hallgatói mobilitás pályázat.
Jelen pályázati felhívás célja a mesteri tanulmányokra beiratkozott
hallgatók gyakorlati projekt jellegű külföldi mobilitásának támogatása. A
megpályázható mobilitási időtartam 2 hónap (az UiT The Arctic
University of Norway (Tromsø-i Egyetem), Narvik-i kampuszában.
A mobilitás során a sikeresen pályázó 3 hallgató kötelező módon meg
kell valósítson egy projektet, melyet előzetesen kiválaszt és melyet a
Támogatási szerződésben is rögzítenek. A megvalósított tevékenység
elismerhető a „Disszertáció gyakorlati megvalósítása” tantárgyként (FMR
és SZIR MSc képzés IV. félévében).

UiT The Arctic University of Norway, Narvik-i kampusza

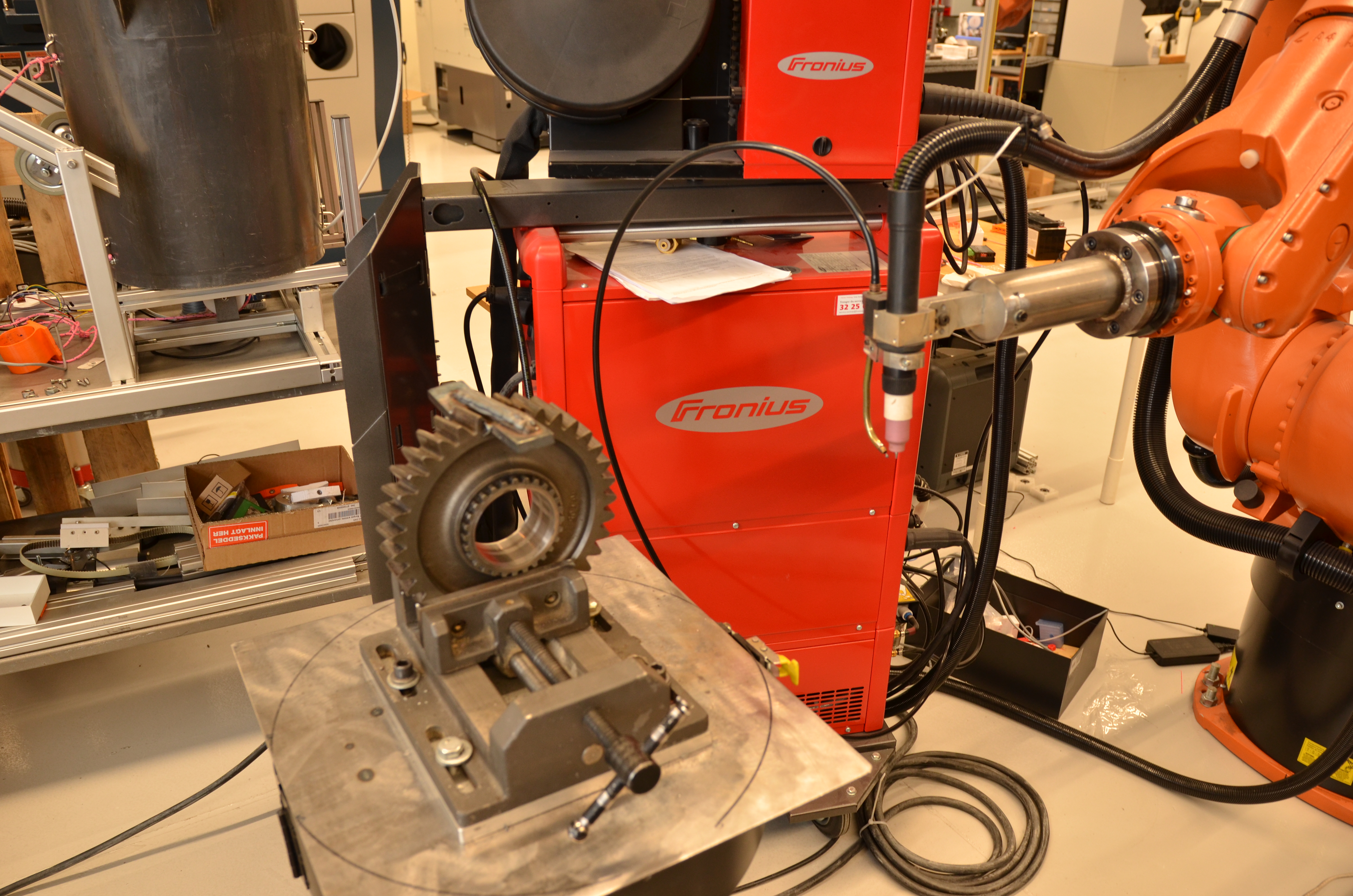

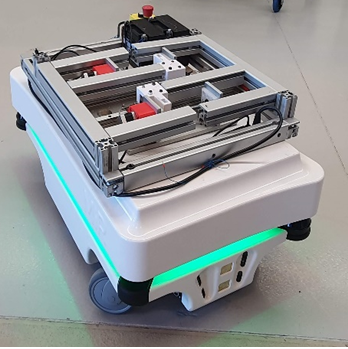
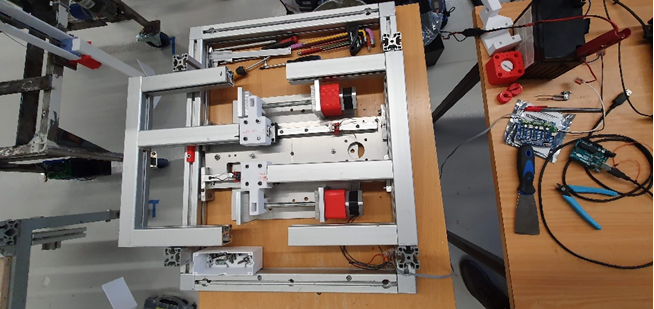
Kósa Arnold István (FMR II.): A gyakornoki program célja a tapasztalatszerzés volt egy modern technológiákkal felszerelt külföldi egyetemen. A Norvégiai gyakornoki program ideje alatt egy PhD hallgató diploma munkájában segítettem. Az újra konfigurálható gyártórendszerek alapjai a mobilis robotok, melyek hálózatba kötve képesek különböző gyártó- és szállító egységéket mozgatni gyártó sorokba. Így például egy robot kar képes a futószalag mindkét végén dolgozni. A feladatom először egy MiR robot kocsira egy dokkoló rendszer mechanikájának és automatizálásának kivitelezése volt. Ez magába foglalta a mechanika megvalósításától kezdve a 3D tervezésen és nyomtatáson át a G-kódokkal, majd Python programmal való vezérlésig mindent. A következő egy – a robot pozicionálásához szükséges – úgynevezett V-markert mozgató mechanizmus fejlesztése volt. A cél a 3D nyomtatott alkatrész fel-le mozgatása volt minél gyorsabban. Ez végül egy fogasszíj alapú hajtással lett kivitelezve. Az utolsó feladat egy paletta fel-le emelésére és szállítására alkalmas platform összerakása volt. A platform kialakításában természetesen szempont volt, hogy a MiR által mozgatható legyen. Ez akár 2m magasságban is képes felemelni a palettát.